
סקירה כללית
משאית קרן אחת היא ציוד נפוץ בתחום התעשייתי, המשמש למימוש תנועת סחורות בחלל תלת מימדי. ביניהם, פעולת שני הכיוונים של המישור האופקי מסתיימת על ידי הגדול, המכונית, הכיוון האנכי של הפעולה אחראי על הרמת מנגנון ההרמה החשמלי, המנוף החשמלי הוא מנוע חרוטי בעל שני מהירויות, מצב הבקרה החשמלי הוא בעצם התחלה ישירה של מגע AC, זרם הפגיעה גדול מדי, קל לגרום נזק למנוע ולרכיבים, חיי הציוד המכני מתקצרים, כמות התחזוקה גדולה יחסית. ומאפיין ויסות המהירות גרוע, איתור הבאגים אינו חלק מספיק.
המאפיינים של פעולת מנוף חשמלי
למנוף יש מומנט התחלתי גדול, בדרך כלל יותר מ-150% מהמומנט הנקוב, אם לוקחים בחשבון עומס יתר וגורמים אחרים, יש לספק לפחות 200% מהמומנט המדורג במהלך תהליך האצת ההתחלה.
כאשר מנגנון ההרמה הולך ואוזל, המנוע יהיה במצב של ייצור חשמל רגנרטיבי והוא חייב להיות נתון לבלימת צריכת אנרגיה או משוב מחודש לרשת.
העומס של מנגנון ההרמה משתנה בחדות כאשר משקולת ההרמה עוזבת או נוגעת בקרקע, והמהפך אמור להיות מסוגל לשלוט בצורה חלקה בעומס הפגיעה.
תכונות מהפך KD600
- בקרת וקטורית לולאה פתוחה בכיוון שדה מגנטי, משתני מנוע מנותקים לחלוטין, עם מומנט בתדר נמוך, מהירות תגובה מהירה ומאפיינים אחרים;
- KD600 מאמצת מצב בקרת וקטור בלולאה פתוחה ללא PG ומצב V/F וקטורי כדי להגדיל את רמת ההספק של צעד אחד;
- טווח תדרים: הגדרת שלב 0.5-600Hz, התאמה רציפה ללא שלבים;
- טווח מתח עבודה: 380V±20%, מתח אוטובוס נמוך באופן מיידי עד 360VDC פעולה ללא בעיות;
- קיבולת עומס יתר: 150% זרם נקוב, אפשר דקה אחת; 200% זרם נקוב, שנייה מותרת;
- מאפייני מומנט: מומנט התחלתי, יותר מפי 2 מהמומנט הנקוב; מומנט בתדר נמוך, 1Hz גדול מפי 1.6 מהמומנט הנקוב; מומנט הבלימה גדול יותר מהמומנט הנקוב.
דיאגרמת חיווט פשוטה
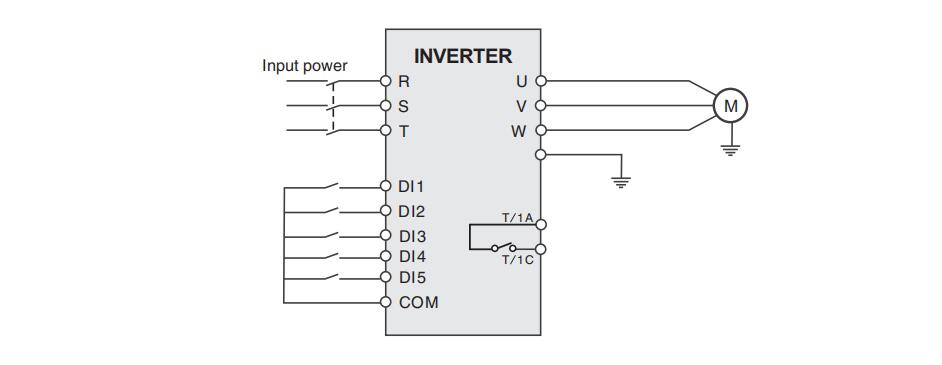
פרמטר התייחסות הגדרות ותיאורים הם כדלקמן
| קוד פונקציה | הגדר ערך | הוֹרָאָה | הֶעָרָה |
| P0-03 | 1 | מצב וקטור | |
| P0-04 | 1 | בקרת מסוף | |
| P0-06 | 4 | תדר מרובה מהירויות | |
| P0-23 | 3 | זמן האצה | |
| P0-25 | 5 | זמן האטה | |
| P6-00 | 32 | בקרת בלמים | |
| B5-00 | 1 | הפעלת בלמים | |
| B5-01 | 2.5 | תדירות שחרור הבלמים | |
| B5-04 | 1.5 | תדירות בלמים | |
| P4-01 | כוח מנוע | ||
| P4-02 | מתח מנוע | ||
| P4-04 | זרם מדורג של מנוע | ||
| P4-05 | תדר מדורג מנוע | ||
| P4-06 | מהירות מנוע | ||
| P5-00 | 1 | קָדִימָה | |
| P5-01 | 2 | לַהֲפוֹך | |
| P5-02 | 12 | רב מהירויות 1 | מהירות נמוכה |
| P5-03 | 13 | רב מהירויות 2 | מהירות בינונית |
| P5-04 | 14 | רב מהירויות 3 | מהירות גבוהה |
| PC-01 | תדר במהירות נמוכה | ||
| PC-02 | תדר מהירות בינונית | ||
| PC-04 | תדר במהירות גבוהה |
ניתוח אפקטי הפעולה
שינוי המרת מהפך מסדרת KD של מערכת הנהיגה, אפקט השינוי הוא אידיאלי, בעיקר ב:
- התחלה רכה ועצירה רכה מתממשים בעת ההפעלה, מה שמפחית את ההשפעה על רשת החשמל.
- השימוש בממיר תדר כדי לבטל את מגע ההילוכים המקורי ואת התנגדות המהירות, כלומר לחסוך בעלויות תחזוקה, אך גם להפחית את זמן התחזוקה בזמן ההשבתה, ובכך לשפר את התפוקה.
- הוו הראשי הפועל ב-5Hz ~ 30Hz יכול להיות בעל השפעה ברורה מאוד.
- שפר את תהליך השטח, חסוך בחומרי גלם;
דברי סיום
השימוש בממיר תדרים לשליטה על הנסיעה הקדמית והאחורית, כמו גם סדרת מנגנוני הנסיעה השמאלית והימנית, יכול להשיג הפעלת תדר יתר, לשפר מאוד את יעילות העבודה תוך הבטחת בטיחות, וגם להפחית את עומס התחזוקה של החלפה תכופה של AC מגע בציוד נהיגה.
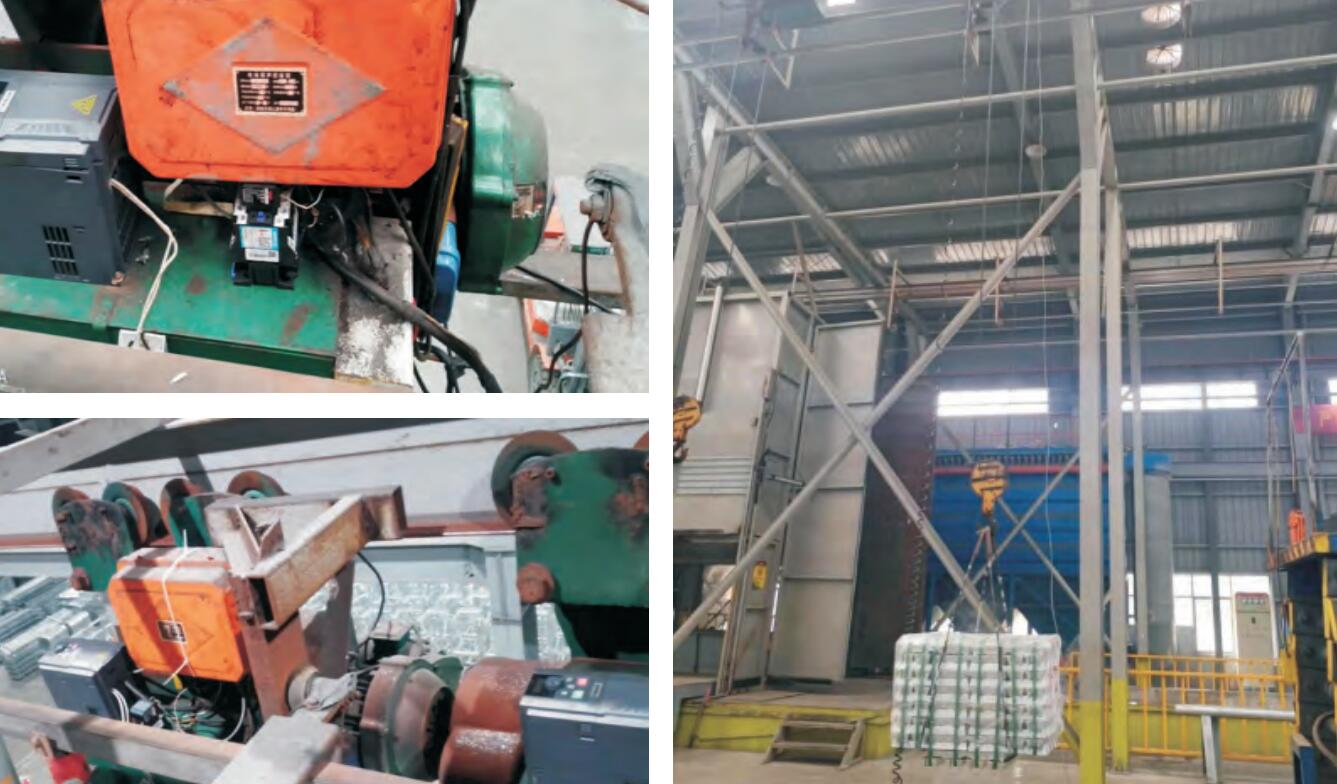
אתר יישום
זמן פרסום: 17 בנובמבר 2023