
סקירה כללית
מנוף גשר, הידוע בכינויו "נהיגה", הוא סוג של מכונות הרמה בשימוש נרחב במפעלי תעשייה וכרייה, מנגנון ההפעלה שלו מורכב משלוש מערכת נהיגה עצמאית בעצם, מערכת נהיגה לרכב, מערכת נהיגת וו, מהפך K-DRIVE ל- למעלה משלוש מערכת נהיגה שעברה רפורמה בהצלחה, להלן מתאר בעיקר את תהליך השינוי של מערכת הנהיגה לפני ואחרי ההליכה.

תָכְנִית יתרונות
- בקרת וקטורית בלולאה פתוחה מכוונת שדה, משתני מנוע מנותקים לחלוטין, מומנט גדול בתדר נמוך, תגובה מהירה וכו';
- KD600 מאמץ PG מצב בקרת וקטור בלולאה פתוחה ומצב V/F וקטורי, ומגביר את תצורת רמת ההספק של ההילוך הראשון;
- טווח תדרים: הגדרת מקטע 0.5-600Hz, התאמה רציפה ללא שלבים;
- טווח מתח עבודה: 380V ± 20%, ומתח האוטובוס יורד ל-360VDC באופן מיידי להפעלה ללא בעיות;
- קיבולת עומס יתר: 150% מהזרם הנקוב, דקה מותרת; 200% זרם מדורג, 1 שניות מותרות;
- מאפייני מומנט: מומנט התחלתי, גדול מפי 2 מהמומנט המדורג; מומנט בתדר נמוך, גדול מפי 1.6 מהמומנט הנקוב ב-1Hz; מומנט הבלימה גדול מהמומנט הנקוב.
מאפייני הפעלה
- למנגנון הרמת המנוף יש מומנט התחלתי גדול, אשר בדרך כלל עולה על 150% מהמומנט הנקוב. אם נלקחים בחשבון עומס יתר וגורמים אחרים, לפחות 200% מהמומנט הנקוב יסופקו במהלך תהליך ההתנעה וההאצה;
- כאשר מנגנון ההרמה פועל כלפי מטה, המנוע יהיה במצב ייצור חשמל רגנרטיבי וחייב להיות בלימה של צריכת אנרגיה או משוב רגנרטיבי לרשת;
- העומס של מנגנון ההרמה משתנה באופן דרמטי כאשר החפץ המורם עוזב או נוגע בקרקע, וממיר התדרים יהיה מסוגל לשלוט בעומס הפגיעה בצורה חלקה;
- מכיוון שמהירות הנסיעה של מנגנון הנסיעה הקדמי והאחורי של העגורן אינה גבוהה במהלך התכנון המכני, ניתן להשתמש בממיר למהירות יתר נכונה כדי לשפר את יעילות העבודה.
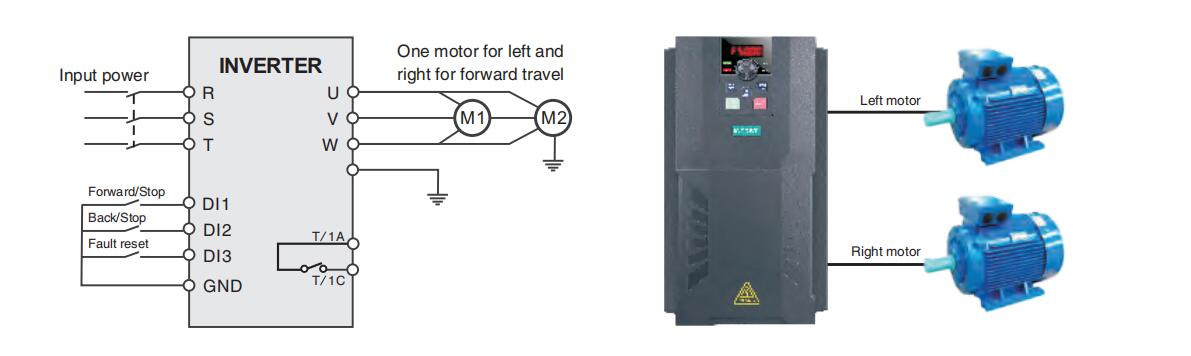
דיאגרמת חיווט פשוטה
הגדרות פרמטרng ותיאור(פרמטרי נסיעה של מנוע שמאל וימין)
| פָּרָמֶטֶר | לְהַסבִּיר | הגדרת פרמטר | לְהַסבִּיר |
| P0-00=0 | בקרת VF | P5-00=1 | קָדִימָה |
| P0-04=1 | עצירת התחלה מסוף חיצונית | P5-01=2 | לבצע מאוחר יותר |
| P0-06=1 | הגדרת תדר דיגיטלי | P6-00=2 | יציאת תקלה ממסר 1 |
| P0-14=60.00 | תדירות מקסימלית | P4-01=1.6KW | כוח מנוע מחובר |
| P0-16=60.00 | תדר גבול עליון | P4-02=380V | מתח מדורג של מנוע |
| P0-11=60.00 | תדר הגדרה דיגיטלי | P4-04=3.3A | זרם מדורג של מנוע |
| P0-23=3.0 שניות | זמן האצה | P4-05=50Hz | תדירות מדורגת של המנוע |
| P0-24=2.0 שניות | זמן האטה | P4-06=960R/Min | מהירות מדורגת של המנוע |
| הערה: כאשר משתמשים בממיר תדר אחד עם שני מנועים, מומלץ מאוד להתקין ממסר תרמי תואם בקצה הקדמי של כל מנוע כדי להגן על כל מנוע. | |||
ניתוח אפקטי הפעולה
ממיר התדרים מסדרת KD600 ביצע טרנספורמציה של המרת תדרים במערכת הנוסעת, ואפקט הטרנספורמציה אידיאלי יחסית, מוצג בעיקר ב:
- ההתחלה הרכה והעצירה הרכה במהלך האתחול מתממשות, מה שמפחית את ההשפעה על רשת החשמל;
- לאחר השימוש בממיר התדר, מושמטים את מגע ההילוכים המקורי ואת הנגד לוויסות המהירות, מה שלא רק חוסך את עלות התחזוקה, אלא גם מקטין את זמן ההשבתה לתחזוקה, ובכך מגדיל את התפוקה;
- כאשר הוו הראשי עובד ב-5Hz ~ 30Hz, אפקט החיסכון באנרגיה ברור מאוד;
- ממיר התדרים משמש לשליטה על הנסיעה הקדמית והאחורית, וסדרת מנגנוני הנסיעה השמאלית והימנית יכולה לממש את עבודת התדר. תחת הנחת היסוד של הבטחת בטיחות, יעילות העבודה משתפרת מאוד, וגם עומס העבודה של התחזוקה של הציוד הנוסע עקב החלפה תכופה של מגע AC מופחת.
דברי סיום
ממיר התדרים משמש לשליטה על ההליכה הקדמית והאחורית וסדרת מנגנוני ההליכה השמאלי והימני, שיכולים לממש עבודת אוברקלוק, לשפר מאוד את יעילות העבודה בהנחה של הבטחת בטיחות, וגם להפחית את עומס התחזוקה של ציוד הנהיגה בשל החלפה תכופה של מגע AC.
אתר יישום

זמן פרסום: 17 בנובמבר 2023